

Advanced Driver Assistance Systems (ADAS) is probably the most interesting area of innovation and research happening within e-Mobility. In this post, we look at the levels of automation, and how it converts into applications for enhancing driver comfort and safety.
The Society of Automotive Engineers (SAE) has actually defined six levels, but the first one (Level 0) is for no automation. Let’s go through all the levels and ADAS features, and then their applications.
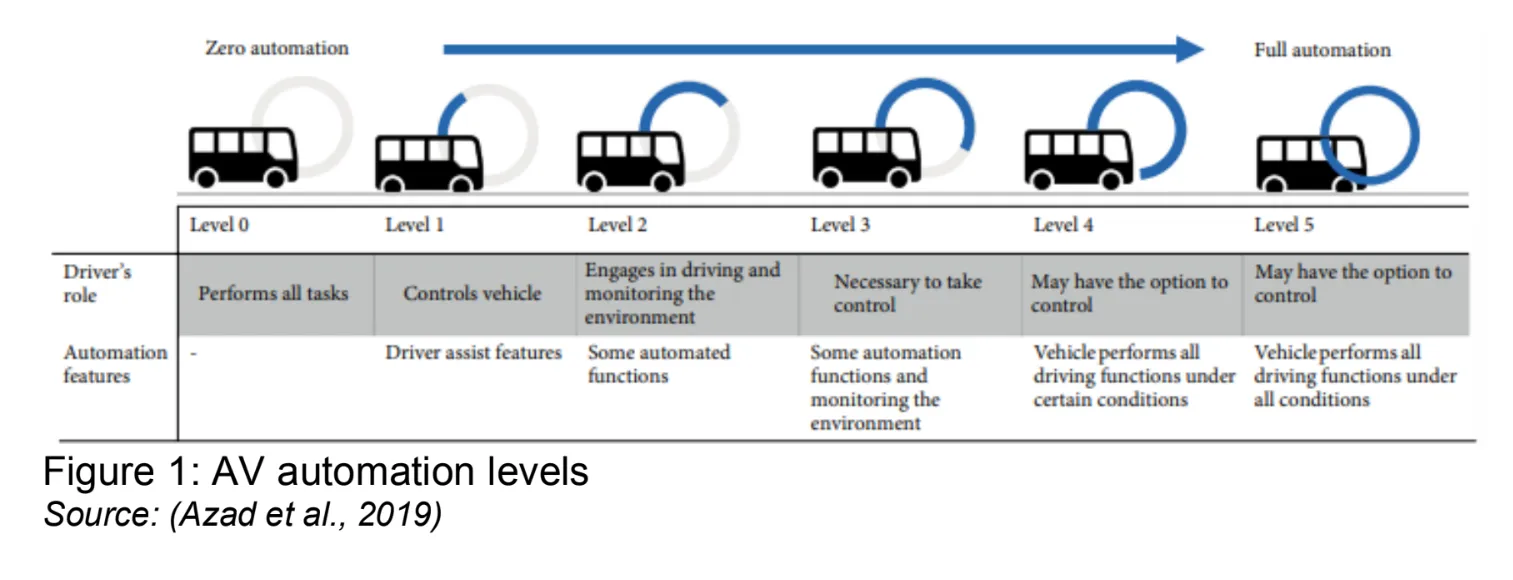
In SAE, there are six levels starting from level zero to level five. Correct. So the thing that you're talking about - ADAS automated drive in assistant systems - that comes in level three to level five. Okay, so SAE level zero to level two would be more accurately stated as driver support features. Whereas three to five we can say as automated driving features. Right. So let me just tell you what in all those levels, what does the human driver does? And what do the features do? And I will give you the examples of what features, okay?
So in SAE level one and two - there the driver is driving. Even when there are some support features engaged - at the time also, the driver is driving, the human driver is driving.
Let's say, for example, the features come as automatic emergency braking, right, line spot warning, lane departure warning. So these are level zero. Right.
Now level one is lens centering or we can call it as adaptive cruise control. Okay. Then in level two, both of them come together, which is lens centering and adaptive cruise control.
Okay. So for by what do I mean by this is, if I talk about level zero, which is automatic emergency braking, line spot warning, lane departure warning. So these features are limited to providing warnings and momentary assistance. Right. But when I come to level one, which is lens centering or adaptive cruise control, it is or okay, or function. Okay. So these features provide you either steering or brake or acceleration support to the driver, both cannot come together.
Either it will provide you the steering support or it will provide you the brake or acceleration support. Okay. In level two, what happens is both of them are present together. That support is present together like both steering as well as brake or acceleration support. But in all these levels, the human driver must be constantly supervising these support features. Right. In case you have to maintain safety, then the driver must be steering braking or accelerating as needed.
But then when we move on to level three, four and five, then you are not driving. Right. Even if you are seated in the driver's seat.
Specifically in SAE level three, the feature might request that you have to drive. Okay.
There might be a request from the feature that, okay, now the human driver should take control.
Okay. And then the human driver should be present to take control. Right. So for example,
SAE level three is traffic jam, traffic jam, shepherd. So when I say traffic jam, shepherd.
So in that case, it identifies, okay, there is a jam ahead. So I need to control the speed.
But there are situations when it is not able to identify the object in front. So if let's say there is an animal, a cow or something, and it is not able to identify it. So at the time it will prompt the human driver that take this decision.
So and then in level four, those are like driverless taxis. But here the pedals or the steering wheel may or may not be installed. Okay. I mean, there can be a provision that the driver does not drive at all. Or there can be a provision that the driver needs to take control in some situations. Switch to manual as required. So these features can drive the vehicle under
limited conditions and will not operate unless all required conditions are met.
So all required conditions as in that system is configured. Right. We have given some inputs
that these are the things that you have to identify before you go on to this autonomous driving mode. So if one of those conditions are not met at the time the human driver has to take the control.
Now comes the last level, which is the S.A. Level five. So these driving features will not require any driver to take over driving. It will drive the vehicle under all conditions. All conditions as in even if it is snowing, even if it is raining, then also it can drive autonomously without the need of a driver.
Here the features are all as level four. But in all conditions, all environmental conditions.
So this is the basic understanding of the six S.A. levels.
Right. So there is this standard also that is by the name of SAE J3016. And it was initially launched in 2014. So it talks about the recommended practice, taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles.
So right now, if I say then we have vehicles in level four, not in India, but in US. So level four vehicle is a vehicle by Google called as Weimoo. Weimoo, yeah. Yeah. So I think that is that is under testing for the last seven to 10 years. Okay. So they're still testing it. Maybe I need to check the time frame, but I am sure it is almost 10 years. Okay. So that, but if I look into India, so in India, the highest level available is level two, which is a goods vehicle by fish I box. So they are testing it in Bangalore.
And you must have seen in the recent news that Mahindra has launched one of the level one vehicles with ADAS. Okay. Okay. That is Mahindra, XUV 700, if I'm not wrong. So it has been in the news recently because even though it is a level one vehicle and it requires a driver to have, you know, complete control over the system and be a lot.
So our driver was driving that vehicle and he slept. So that is in the news right now that there is a legal thing going on. Right. So all this being very intuitive to us to transport planners and all. But the thing is there are safety concerns in this, like, because when a vehicle is driving itself, it is recording all your data and this makes it vulnerable for cyber crime. And secondly, yeah, privacy.
Why do you think that they are being tested since so long, but still are not on the Road? Because still now there is this chicken egg problem that if the vehicle hits someone, who should be liable for it? Yeah, which party are right? Yes, which party has to take the responsibility of it? So these are few questions which are still, you know, in discussion, somebody says that the manufacturer has to do it, somebody says the driver has to take the responsibility.
But then this question comes that in level, if it is a level four or level five, then you say that a driver's support is not required. It will drive itself. But then if it hits, then how come it becomes the responsibility of a driver? But then we very well know that whenever these testing's happen, they happen in so much of controlled situations that is not actually what we see in the roads. That will be different. I have seen there are a lot of pilots going on, including autonomous vehicles in public transport.
So generally what happens when we look into the utilization of AVs, we generally find that these can be used in three situations.
Firstly, as personal vehicles, secondly, as a support to the public transport, for example, they can serve in the first mile or the last mile connectivity. And thirdly, they are itself the public transport. So, if we see, for example, Delhi Metro, Delhi Metro is autonomous. So the Delhi Metro does not require a driver.
But then in case of a Metro, its track is, you know, completely separate.
Yes. Completely separate. It works on, you know, controls that, okay, the track is clear and the Metro can move on. But when it comes to on road driving, there are other parties involved, which we term as stochastic modes. So stochastic modes as in the human drivers.
And there are various modes. If we talk about Indian context, there are various modes, it is starting from two villas, scooties, motorcycles to, you know, these LCVs, heavy duty trucks and all those things. Also, we find a lot of, you know, animal creatures on the Indian roads.
So here, there is a unique challenge when we talk about India in terms of automation.
From the regulatory point of view, now I just read in the news that California has approved Mercedes-Benz's level three. So in India, we generally need a CMDR.
Central Motor Vehicle, so the motor vehicle rules. But currently, if I look into even Mahindra, so they have launched it not as an autonomous vehicle. But as, you know, saying that, okay, there are some driver support features. Because once we term it as autonomous vehicle, because SAE is not an Indian body.
So there is no equivalent Indian body to SAE. So in India, we don't have this levels one, two, three, four and five or so ever. But they have launched it as, okay, we have some features that can help the driver. For example, if the driver is getting drowsy, it will give you a thing that, okay, you are not awake, you are not alert. Also, you in every car, you have seen that if the driver seat, driver seat, what do I say, door is not properly closed, it gives you a beeping thing.
So all these come under level zero only of autonomous vehicles. But in India, we don't term it as autonomous vehicle. So currently there is no specific body in India. Or this. Yeah. Yeah. Right. But the testing is going on. So after the spy alerts that I mentioned, they reach a stage where they can, you know, go for approvals at the time might India might come with something. But right now there is nothing. There is nothing.
So from my thesis, what I have found one thing is that we know that the transformation to a full autonomous situation cannot happen, you know, in one night. Of course. So, so there will be a transition period just like we have seen in electric vehicles. Some are EVs, some are, you know, non-EVs, who are existing together. Right. The same situation is going to come in India when we go for autonomy. If in case we are going for autonomy at some point of time. So, it is more palatable to use autonomous vehicles in the public transport.
Than using them as, you know, personal vehicles. Because even though we are saying in future when we already have this electric vehicle system, altogether ecosystem, then we will club them up with autonomous driving. Okay. I get it that they are going, they are reducing the CO2 levels, the emissions. But what about the traffic jams? Right now what India does is they increase the road capacity. But when you increase the road capacity in the initial one or two years, you find that okay, my jams are not happening. But after two to three years, again, that capacity gets crowded. Because our population is increasing as a result our vehicle population is increasing.
So, unless we bring these strict regulations of controlling the vehicle population growth in personal vehicles, there is no help towards, you know, reducing the traffic jams or concessions.
So, so even we have there are various studies which says that when there is an autonomous vehicle and people are using it as a private vehicle, so it increases the vehicle kilometers traveled. So, that in turn increases the dead kilometers. So dead kilometers is where the vehicle is just driving and there is no one sitting in the vehicle.
So, or there is no purpose of that driving. So, in that case, it keeps on adding to your congestion levels. So, instead, if we use it in public transport, for example, buses, we know that many cities have already a BRT lanes. Yes. So, so there is no like, you know, situation where in the BRT lanes, there would be mix of other vehicles.
As per regulation, generally it happens, but as per regulation, it should not. So, it is more palatable to bringing in autonomous vehicles in India as public buses. Yeah. If I say public transport, it is not a correct terminology because metro is also public transport. So, as buses, it would be more interesting.
Alcohol ignition interlock devices do not allow drivers to start the car if the breath alcohol level is above a pre-described amount.
Blind spot monitor involves cameras that monitor the driver's blind spots and notify the driver if any obstacles come close to the vehicle.
Driver drowsiness detection aims to prevent collisions due to driver fatigue
Driver monitoring system is designed to monitor the alertness of the driver.
Electric vehicle warning sounds notify pedestrians and cyclists that a hybrid or plug-in electric vehicle is nearby.
Forward collision warning(FCW) monitor the speed of the vehicle and the vehicle in front of it, and the open distance around the vehicle.
Intelligent speed adaptation or intelligent speed advice (ISA) assists drivers with compliance to the speed limit.
Intersection assistants use two radar sensors in the front bumper and sides of the car to monitor if there are any oncoming cars.
Lane departure warning system (LDW) alerts the driver when they partially merge into a lane without using their turn signals.
Parking sensors can scan the vehicle's surroundings for objects when the driver initiates parking.
Tire pressure monitoring determines when the tire pressure is outside the normal inflation pressure range.
Vibrating seat warnings alert the driver of danger.
Wrong-way driving warning issue alerts drivers when it is detected that they are on the wrong side of the road.
Pedestrian protection systems are designed to minimize the number of crashes or injuries that occur between a vehicle and a pedestrian
Adaptive cruise control (ACC) can maintain a chosen velocity and distance between a vehicle and the vehicle ahead.
Anti-lock braking system (ABS) restore traction to a car's tires by regulating the brake pressure when the vehicle begins to skid.
Automatic parking fully takes over control of parking functions, including steering, braking, and acceleration, to assist drivers in parking.
Collision avoidance system (pre-crash system) uses small radar detectors.
Crosswind stabilization helps prevent a vehicle from overturning when strong winds hit its side.
Cruise control can maintain a specific speed pre-determined by the driver.
Electronic stability control (ESC) can reduce the speed of the car and activate individual brakes to prevent understeer and oversteer.
Emergency driver assistant facilitates emergency counteract measures if the driver falls asleep or does not perform any driving action.
Hill descent control helps drivers maintain a safe speed when driving down a hill or other decline.
Hill-start assist, also known as hill-start control or hill holder, helps prevent a vehicle from rolling backward down a hill.
Lane centering assists the driver in keeping the vehicle centered in a lane.
Lane change assistance helps the driver through a safe completion of a lane change.
Rain sensors detect water and automatically trigger electrical actions, such as the raising of open windows and the closing of open convertible tops.
Traction control system (TCS) helps prevent traction loss in vehicles and prevent vehicle turnover on sharp curves and turns.
Automotive head-up display (auto-HUD) safely displays essential system information to a driver at a vantage point.
Automotive navigation systems use digital mapping tools.
Automotive night vision systems enable the vehicle to detect obstacles, including pedestrians, in a nighttime setting or heavy weather situation.
Backup camera provides real-time video information regarding the location of your vehicle and its surroundings.
Glare-free high beam uses Light Emitting Diodes, more commonly known as LEDs, to cut two or more cars from the light distribution.
Omniview technology improves a driver's visibility by offering a 360-degree viewing system.
Traffic sign recognition (TSR) systems can recognize common traffic signs, such as a “stop” sign or a “turn ahead” sign.
Vehicular communication systems come in three forms: vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), and vehicle-to-everything (V2X).



%20(1).webp)
.webp)



